ACM Transactions on Graphics (Proceedings of SIGGRAPH), 2026
[ project page / pdf (78mb) / arXiv / code / bibtex ]
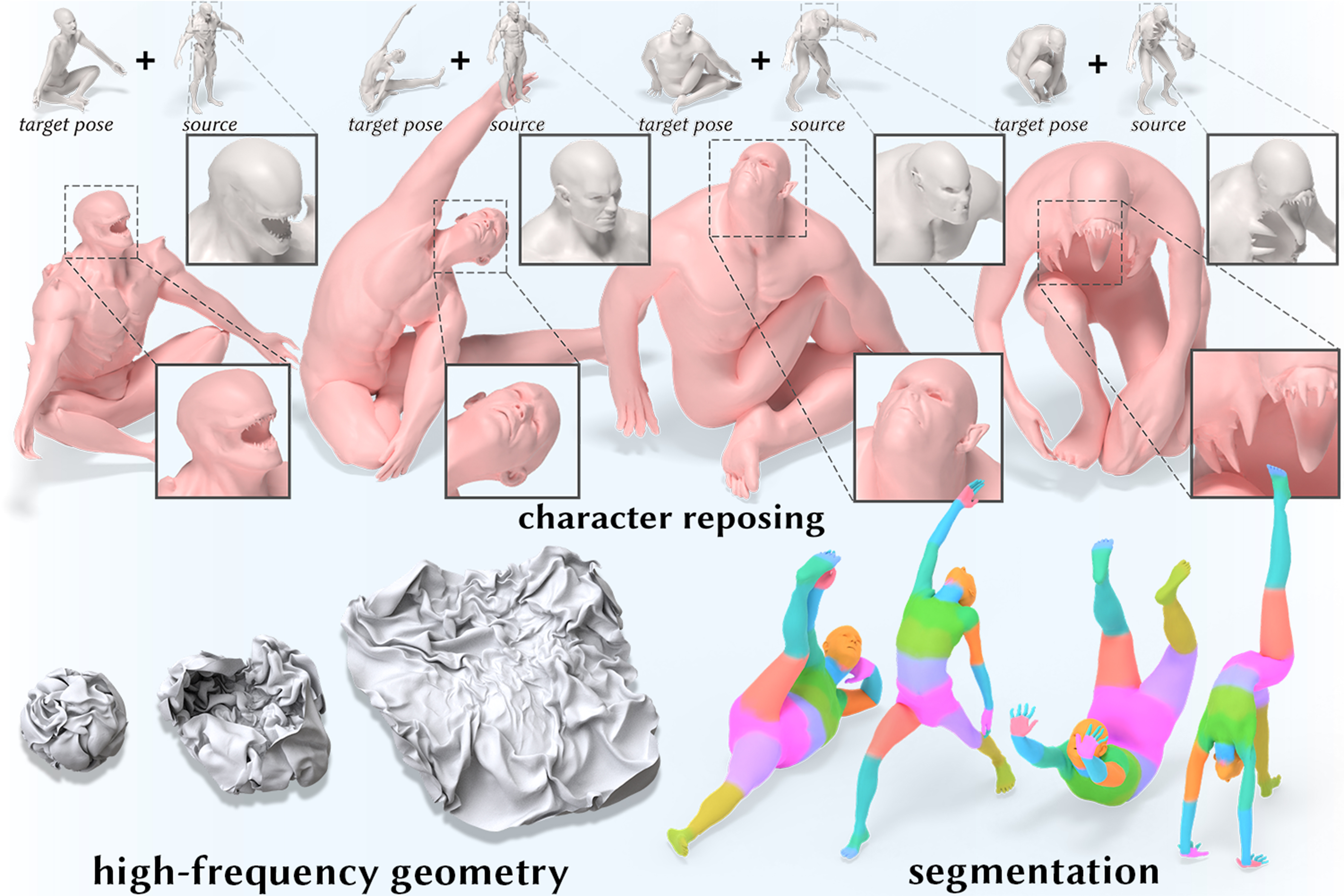
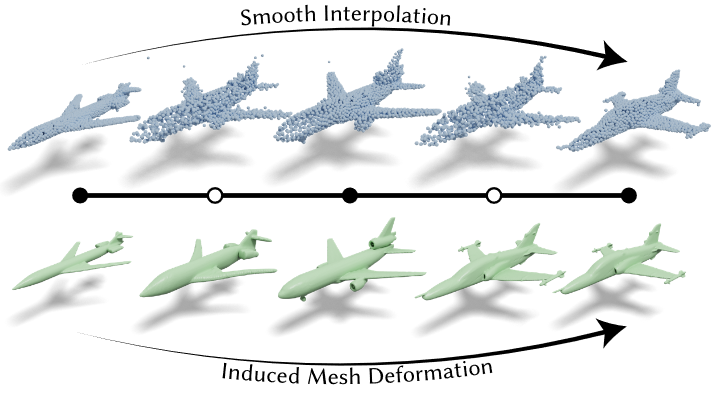
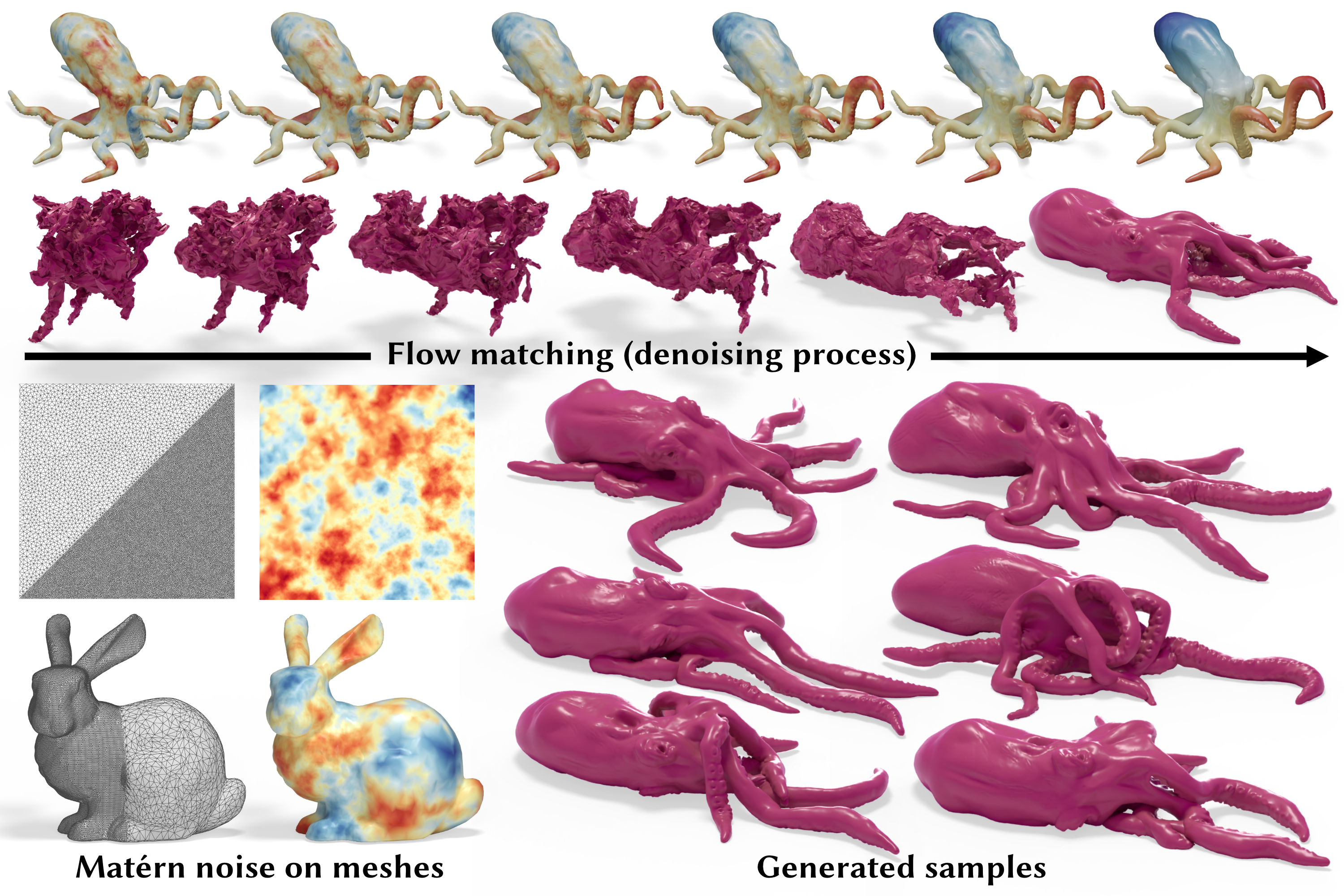
Generative modeling on surfaces requires delicate care due to irregular triangulations. We employ Matérn noise (as opposed to iid Gaussian noise) to enable triangulation-agnostic flow matching on meshes.